MIT Robotics Team 2014
2014, May 02
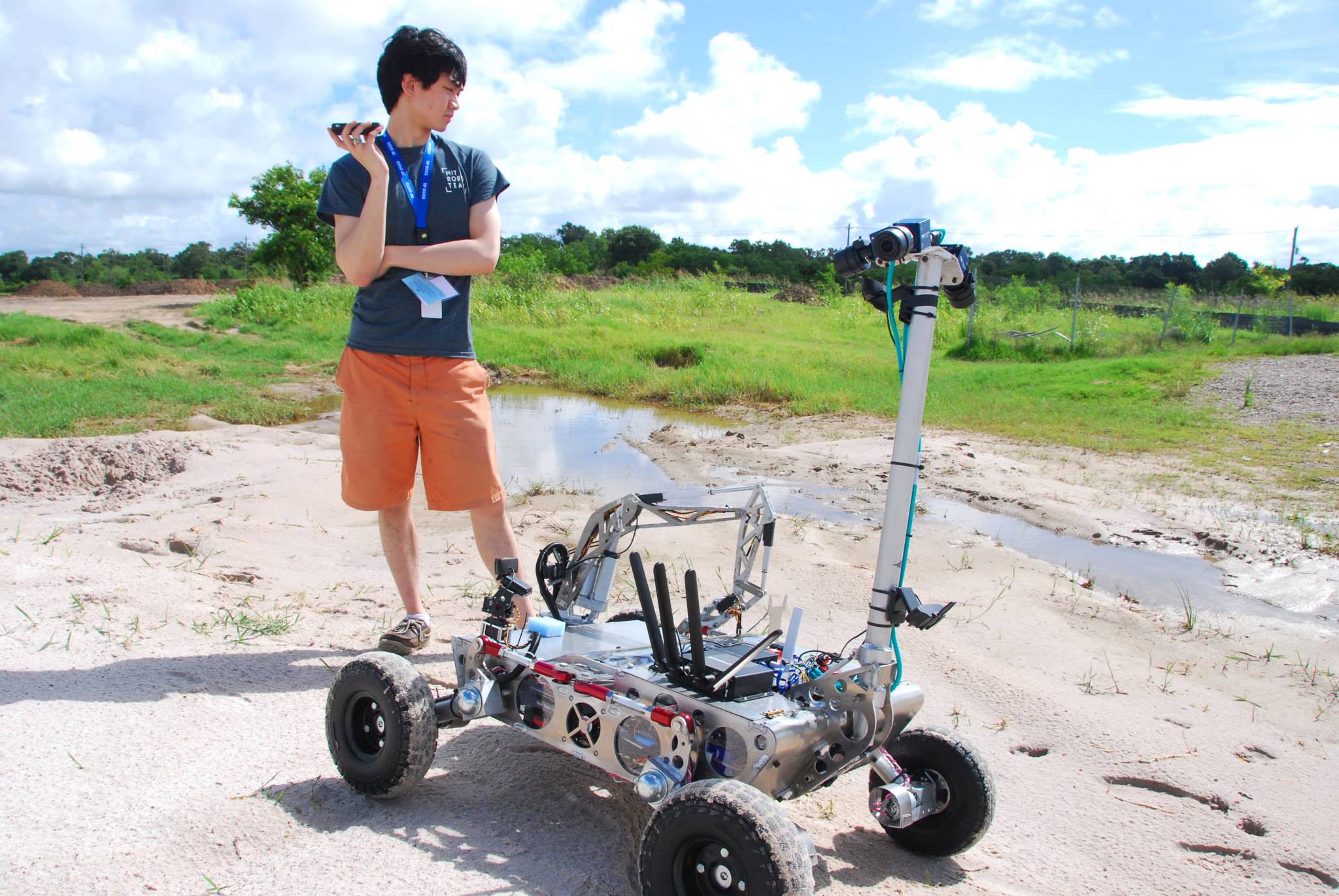
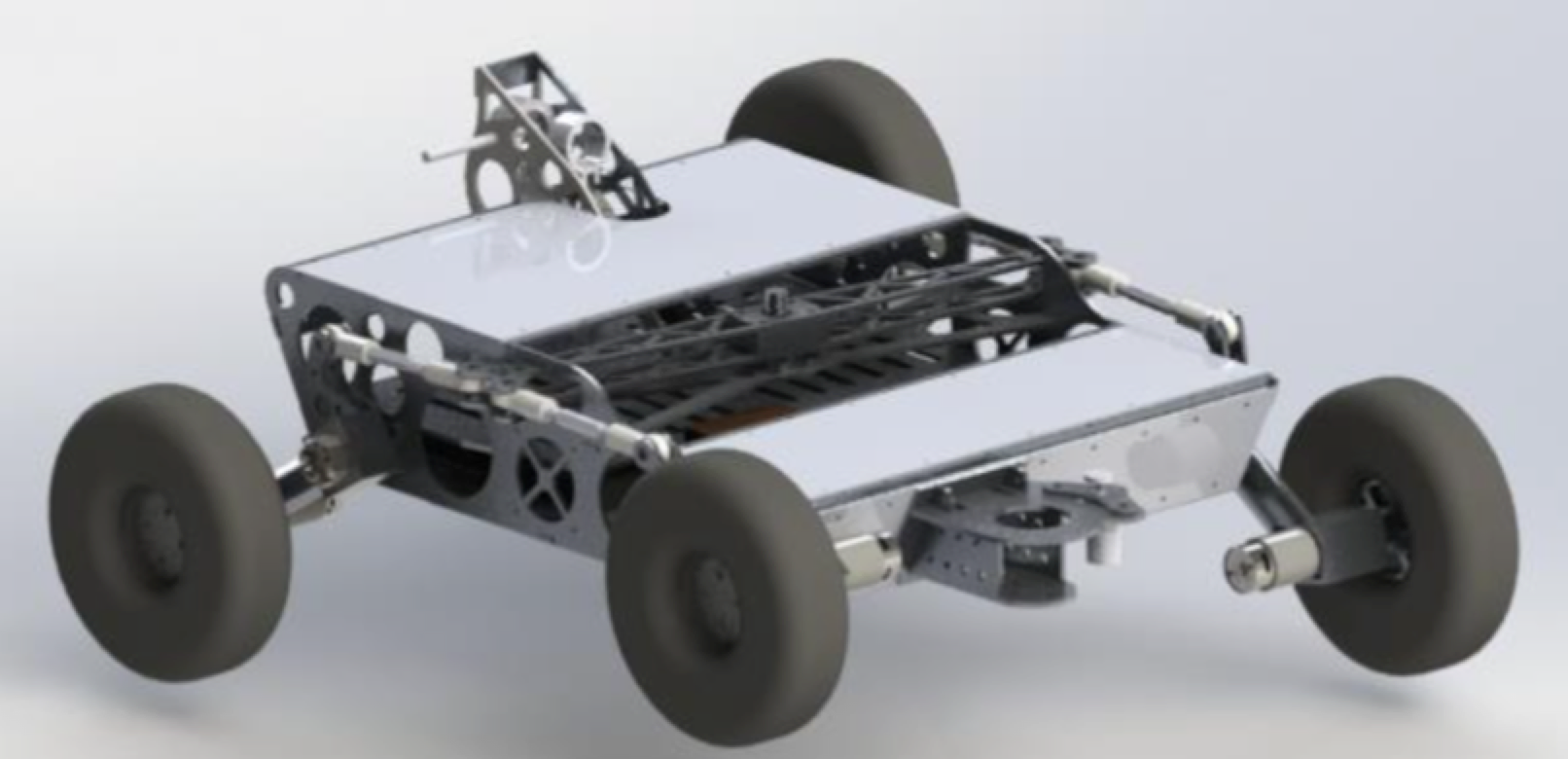
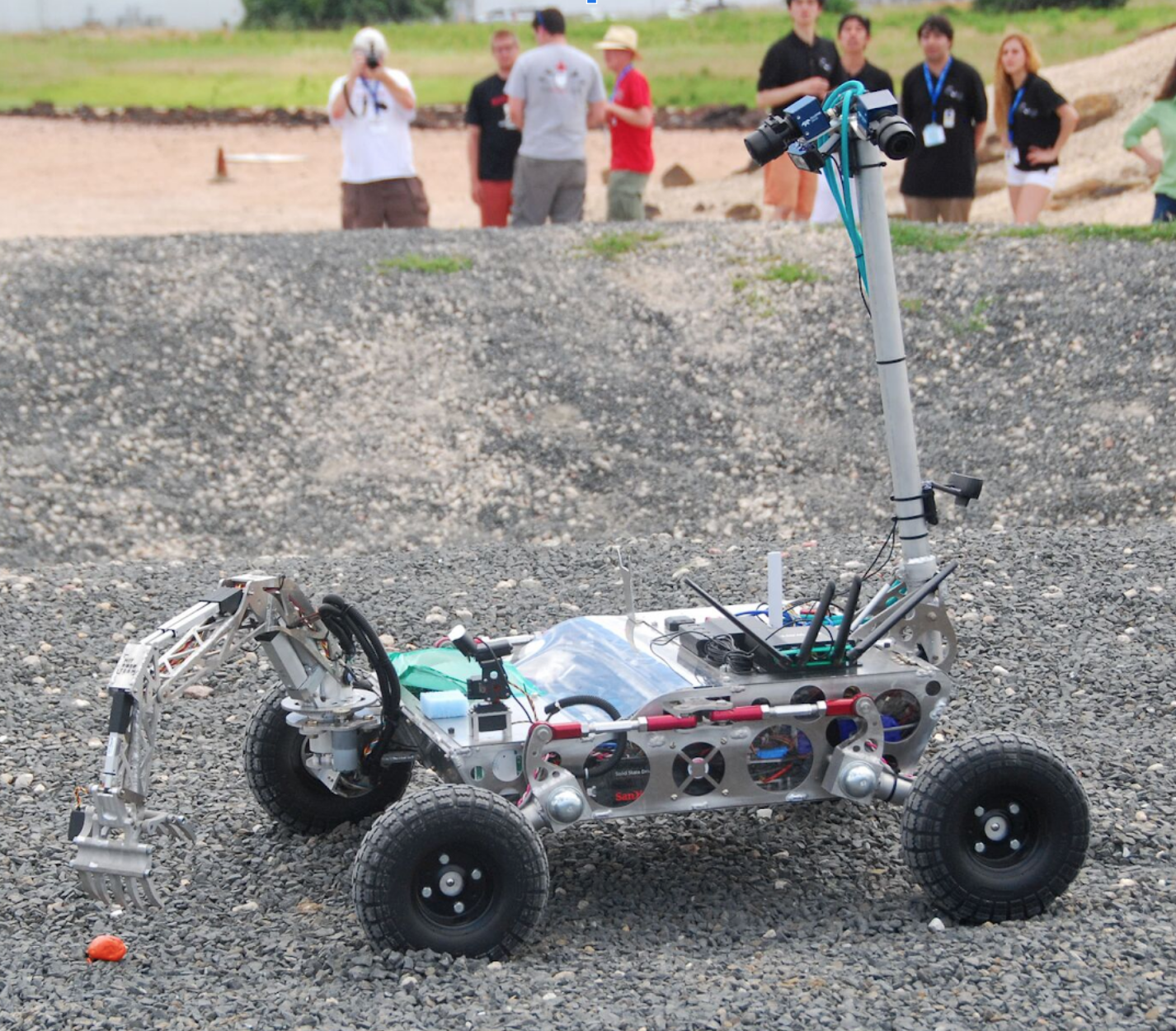
In my sophomore year of college, I started a team with some friends to participate in the NASA RASC-AL ROBO-OPS competition. We build a tele-operated rover to drive around simulated lunar and martian terrains to pick up and store colored rocks. I designed and built the chassis and drivetrain, which was modeled after a rocker-bogie system common to many existing space rovers. Our midpoint progress video portrays an early prototype of the drivetrain in action. We placed 2nd in the 2014 competition, and later showcased our robot here and in our in our team promo video.